Living Distance

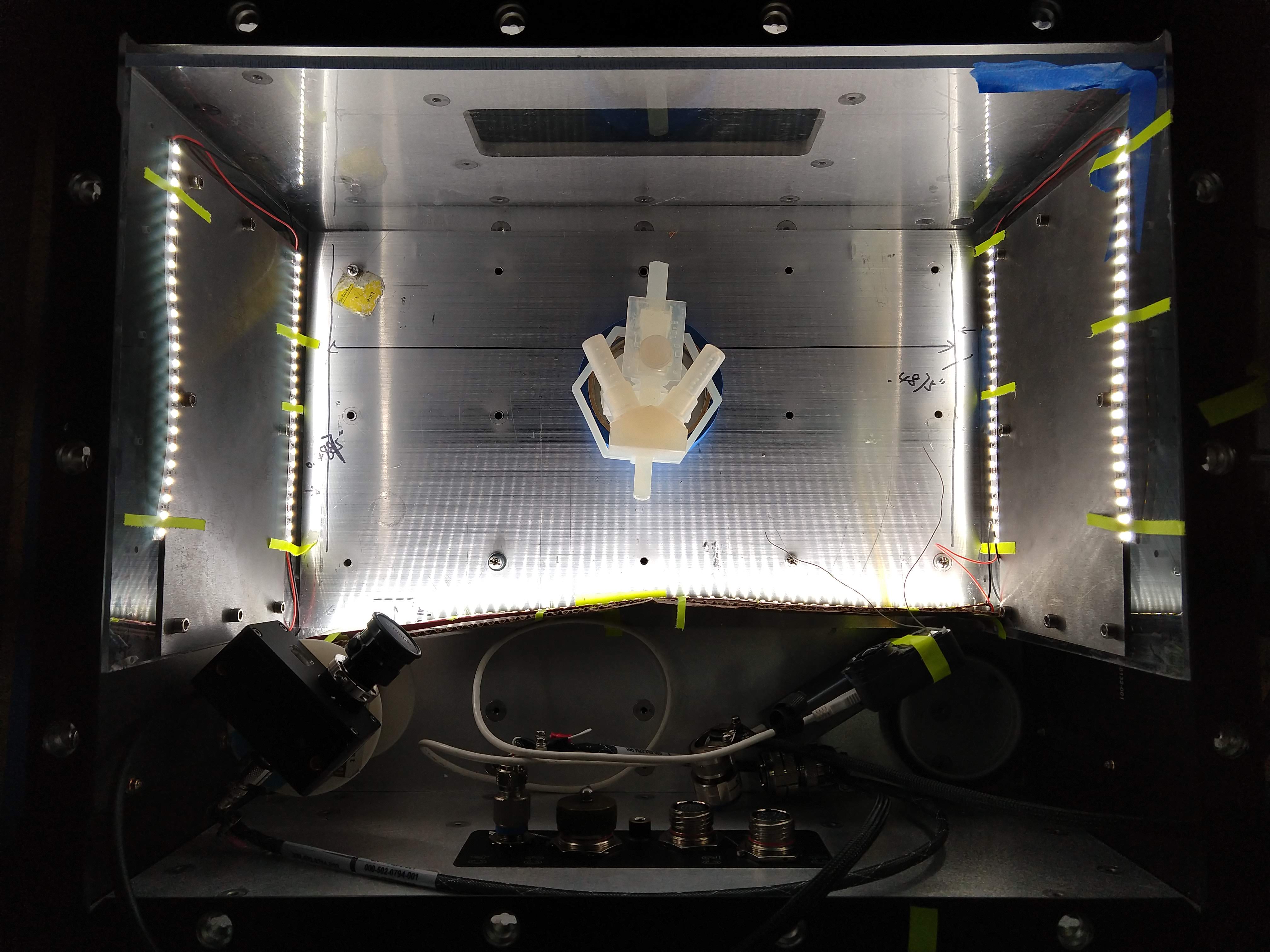
I worked with Slow Immediate on Living Distance, a hybrid art/research performance in zero-g. The mission was part of the MIT Media Lab’s Space Exploration initiative and flew in May 2019 on a Blue Origin mission NS-11. The payload consisted of a free-floating robotic device and supporting camera and capture systems.
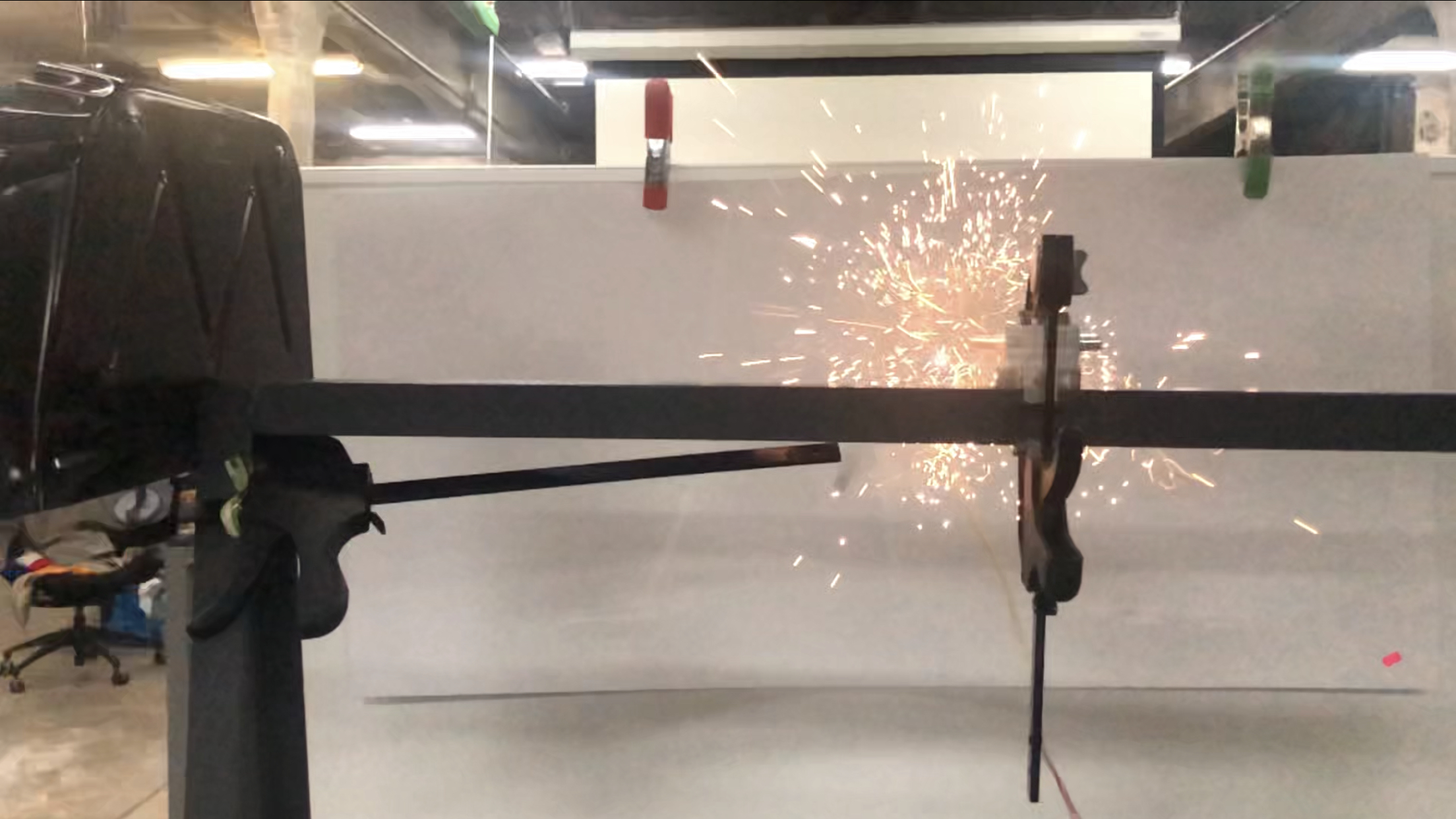
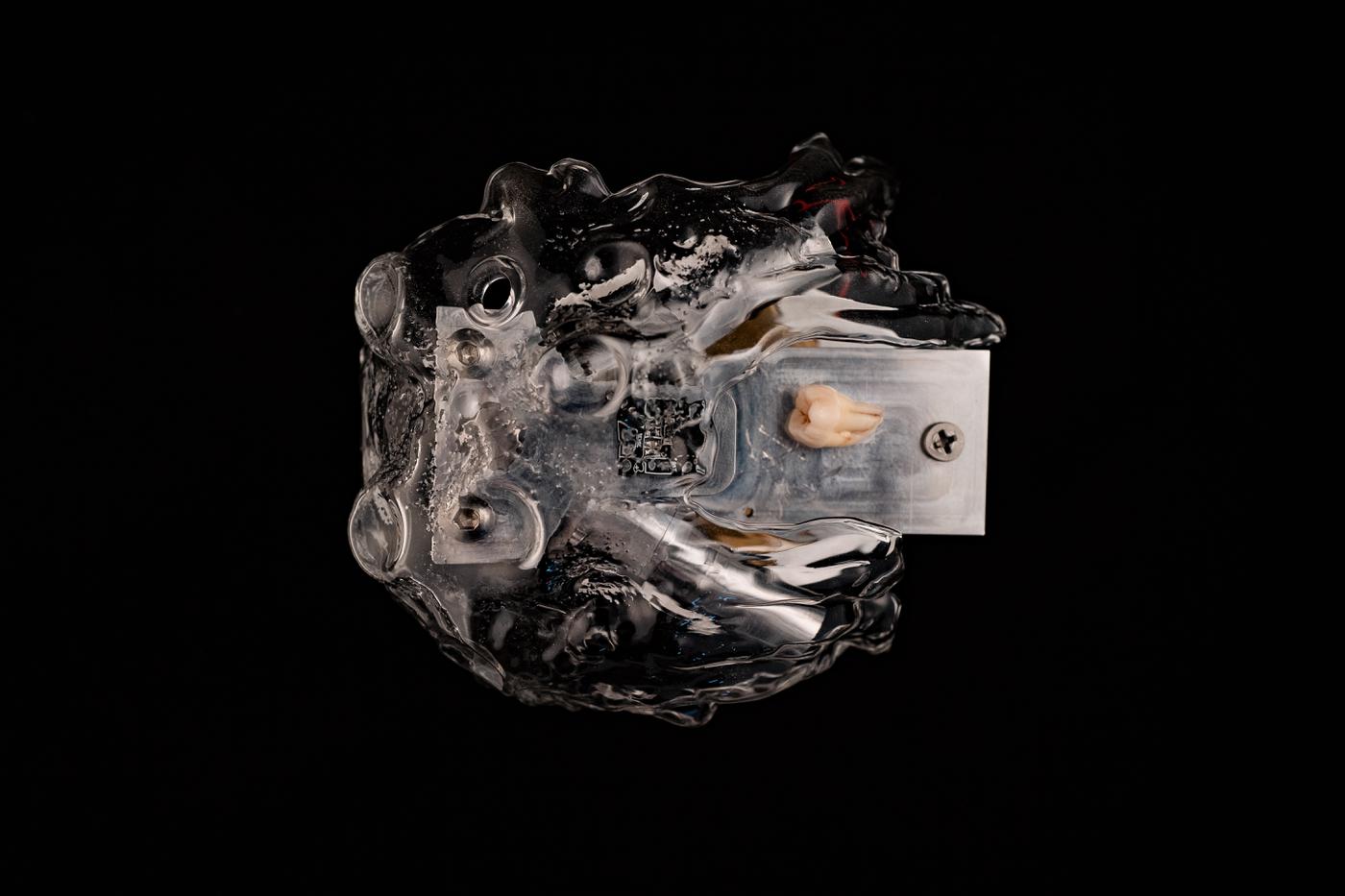
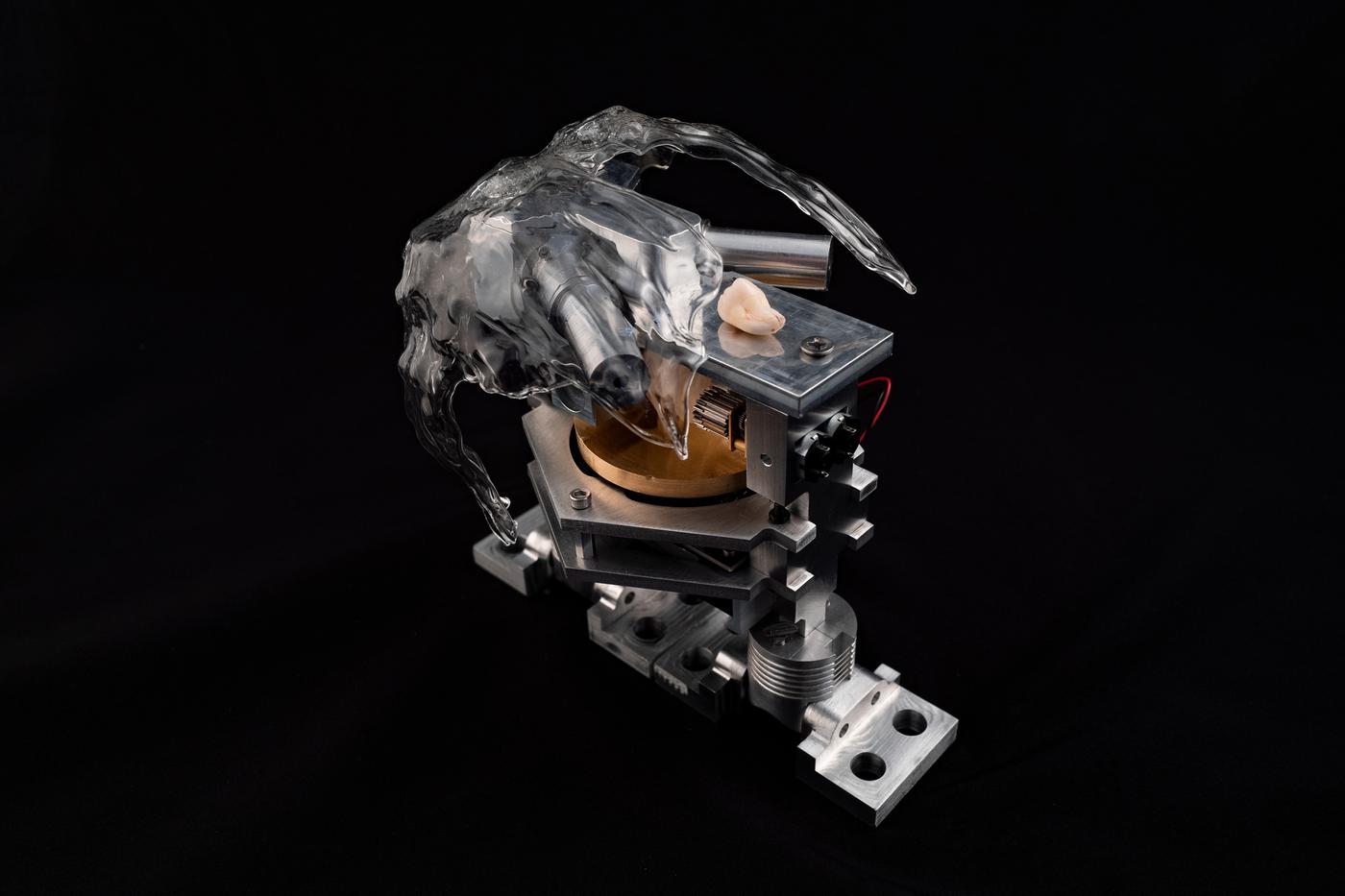
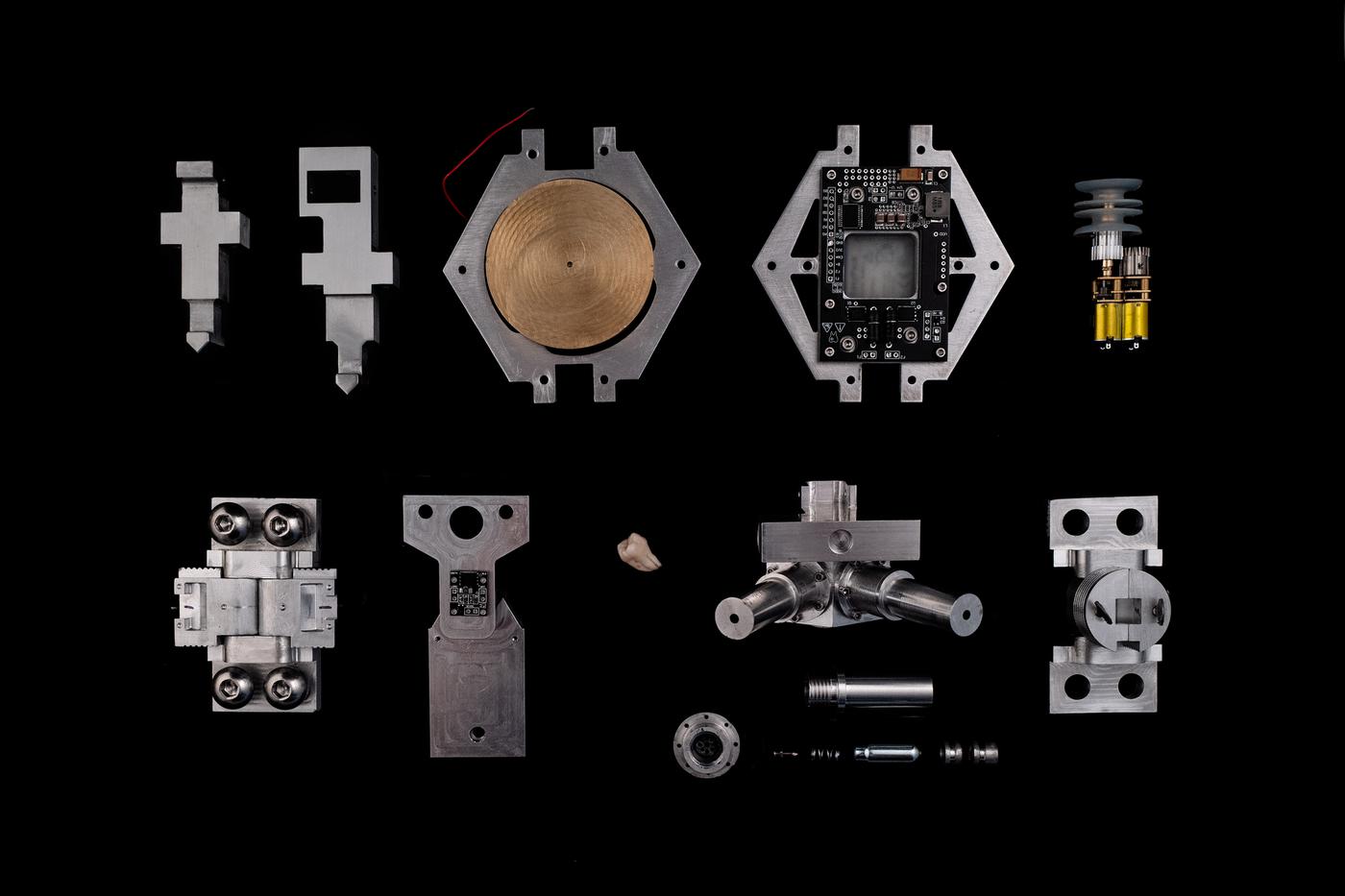
During the spaceflight, the robotic device would become active only during the zero-g portion of the flight, releasing from its tether, spinning up a stabilizing reaction wheel, and performing some enclosed-locomotion experiments. The device itself carries its creator’s wisdom tooth at the top of the mechanical stack, as totem/surrogate of the artist herself.
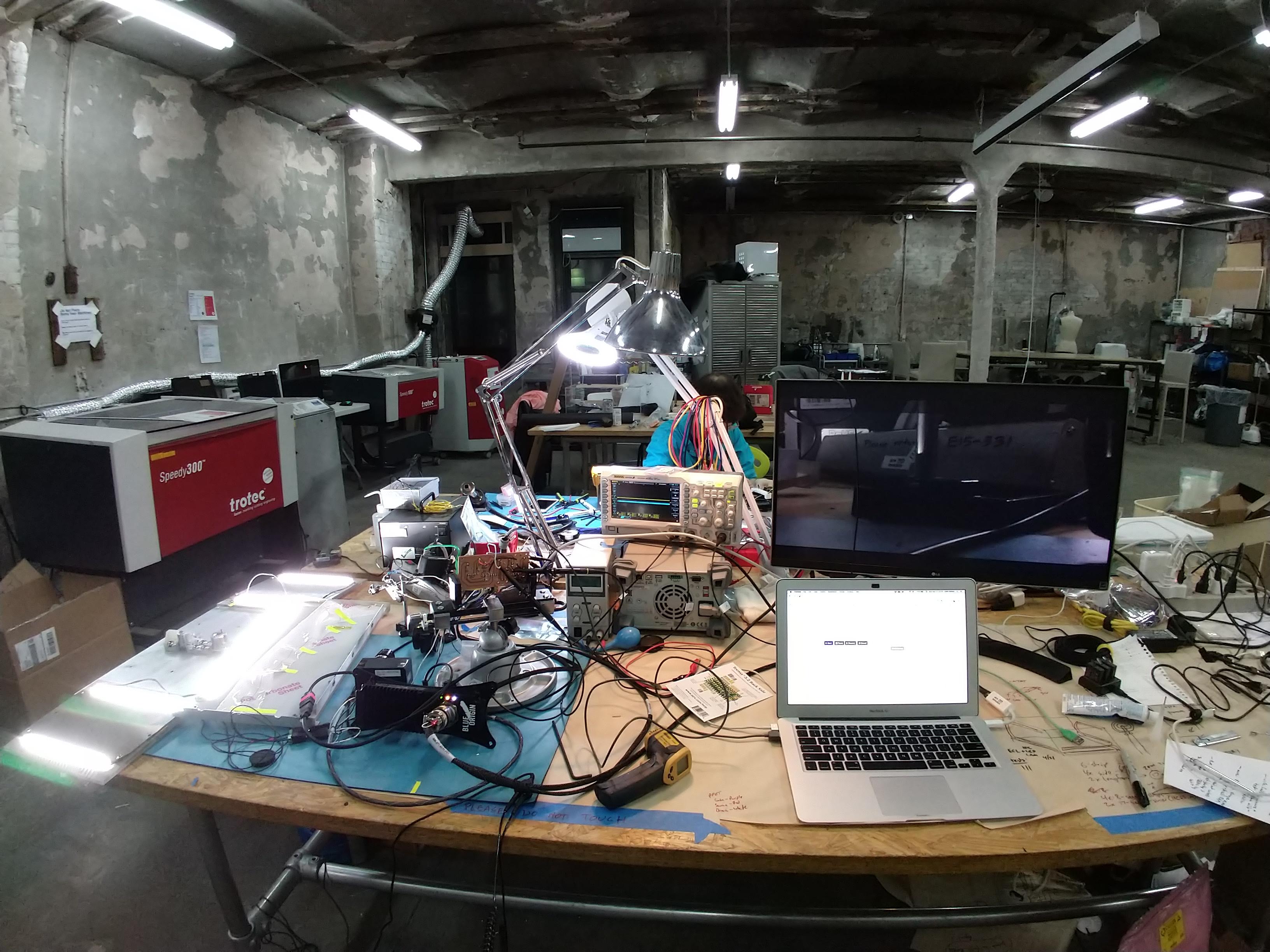
For this mission, I wrote the firmware for the robotic device and the ECL (camera and flight-event sequencing) systems. I also vivisected a GoPro 6 in order to allow it to be remotely triggered by the firmware.
See more of Slow Immediate’s awesome work here. Slow Immediate is Xin and Gershon.